Posted in卡尔曼滤波教程 1.最优估计的概念 Posted by By ben kalman 2020-12-27 在自动控制、通讯、航空与航天等学科领域中,常常会遇到“估计”问题。所谓估计,就是从带有随机干扰的观测数据中,提取有用信息。 估计问题可叙述为:如果假设被估计量是一个维向量,而维向量是其观测量,…
Posted in卡尔曼滤波教程 2.卡尔曼滤波简介 Posted by By ben kalman 2020-11-20 卡尔曼滤波是对随机信号作估计的算法之一。与最小二乘、维纳滤波等诸多估计算法相比,卡尔曼滤波具有显著的优点:采用状态空间法在时域内设计滤波器,用状态方程描述任何复杂多维信号的动力学特性,避开了在频域…
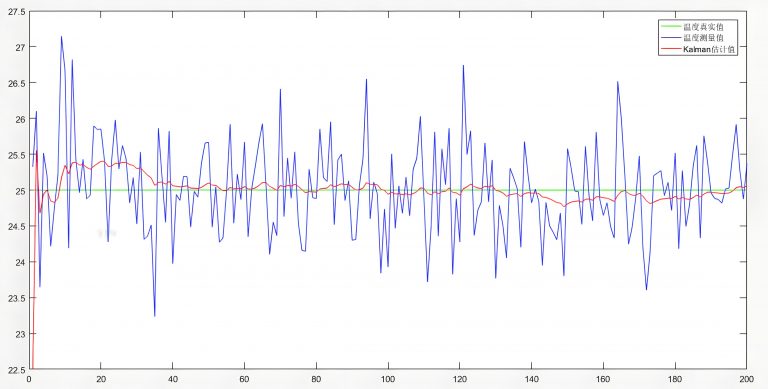
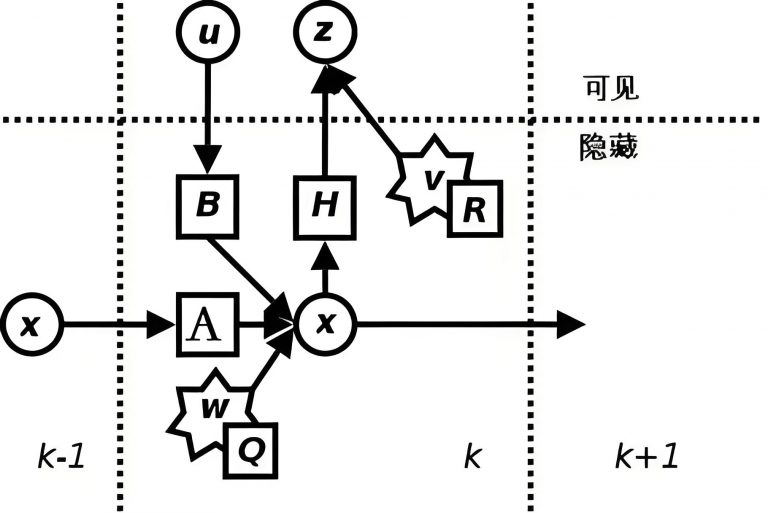
Posted in卡尔曼滤波教程 3.标准卡尔曼滤波 Posted by By ben kalman 2020-10-20 假设有线性离散系统如下: 和是零均值,不相关的白噪声,有已知的协方差矩阵和,既: 其中是函数,既如果那么,如果那么。我们的目的是在已知的系统动态方程和带噪声量测的基础上估计状态量。对于状态…
Posted in卡尔曼滤波教程 4.扩展卡尔曼滤波 Posted by By ben kalman 2020-09-20 阿波罗11的导航是一个非线性问题,标准卡尔曼滤波无法处理,需要非线性系统的解决方案,扩展卡尔曼滤波,它实现体现了工程与数学的完美结合——用有限的60年代计算资源,完成了人类史上最精确的太空导航,是…
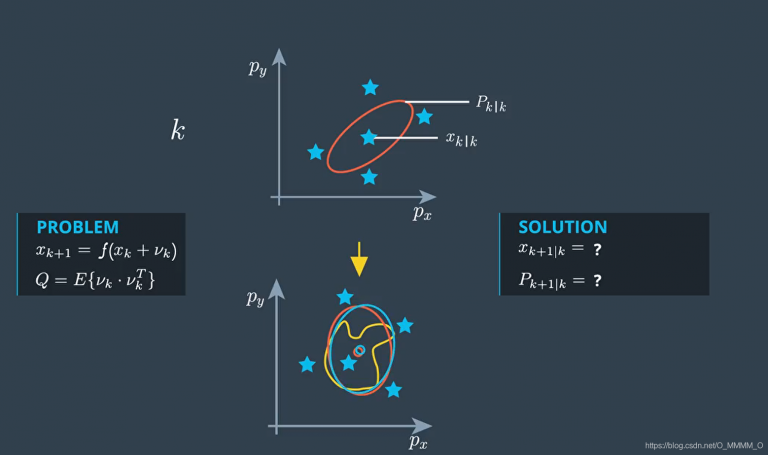
Posted in卡尔曼滤波教程 5.无迹卡尔曼滤波 Posted by By ben kalman 2020-08-20 无迹卡尔曼滤波 (Unscented Kalman Filter, UKF) 是一种高效的非线性滤波算法,由Julier和Uhlmann于1997年提出。它通过无迹变换 (Unscented Tr…