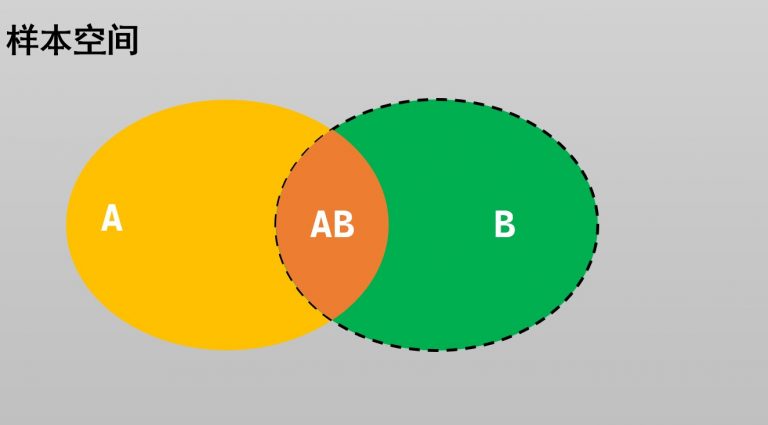
Posted in贝叶斯角度的卡尔曼滤波 1.全概率公式与贝叶斯定理 Posted by By ben kalman 2023-12-24 贝叶斯公式是英国学者托马斯·贝叶斯(ThomasBayes, 1702-1761)最早发现的。该结果首次发表于1763年,当时贝叶斯已经去世,而且该结果并未引起人们的重视;1774年,法国数学家拉普拉斯(Laplace)再次总结了这些结果。
Posted in贝叶斯角度的卡尔曼滤波 2.贝叶斯滤波及贝叶斯角度的卡尔曼滤波 Posted by By ben kalman 2023-11-21 在贝叶斯滤波的框架下,卡尔曼滤波的有效性依赖于以下六个关键假设**(注:从最小二乘法(Least Squares, LS)的角度推导卡尔曼滤波时,最后两个假设不再必要)。
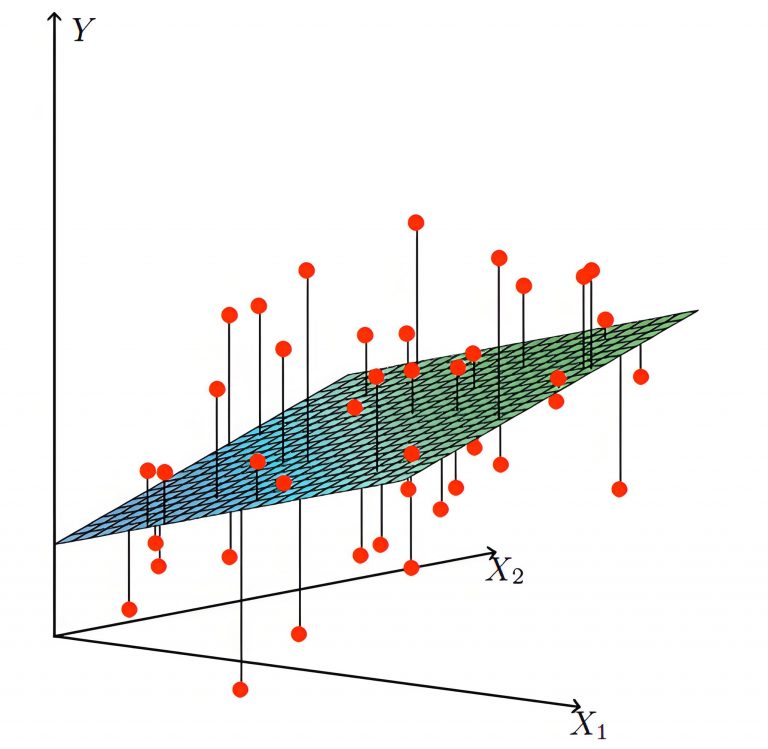
Posted in最小二乘法及其基础 1.最小二乘法及其历史 Posted by By ben kalman 2021-12-20 最小二乘法(Least Squares Method,简称LSM),又称最小平方法,是一种数学优化技术。它通过最小化误差的平方和来寻找数据的最佳函数匹配。具体来说,就是寻找一个函数,使得该函数与观…
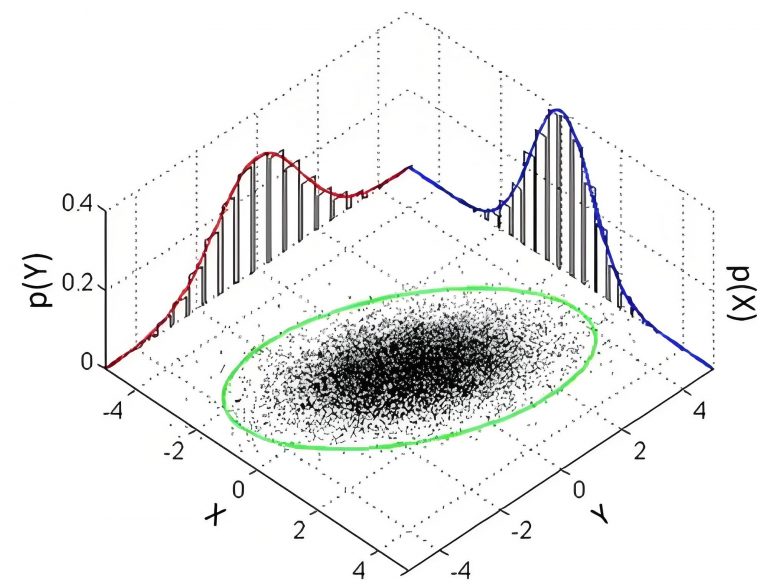
Posted in最小二乘法及其基础 2.协方差矩阵及其应用 Posted by By ben kalman 2021-11-20 协方差矩阵(Covariance Matrix)是一种在概率论和统计学中广泛使用的矩阵,它用于表示随机向量中给定的元素对之间的协方差值。协方差矩阵也可以称为色散矩阵、方差-协方差矩阵或方差矩阵。以…
Posted in最小二乘法及其基础 3.线性最小方差估计 Posted by By ben kalman 2021-10-20 线性最小方差估计(Linear Minimum Variance Estimation, LMVE)是一种统计估计方法,它适用于已知对象的一阶和二阶统计特性(即均值和方差)的情况,并假设估计值是观…
Posted in最小二乘法及其基础 4.递推最小二乘法 Posted by By ben kalman 2021-09-20 递推最小二乘法(Recursive Least Squares,简称RLS)是一种经典的参数估计方法,广泛应用于信号处理、通信系统、自适应滤波、控制系统等领域。它通过不断迭代更新参数,逐步逼近最优…
Posted in卡尔曼滤波教程 1.最优估计的概念 Posted by By ben kalman 2020-12-27 在自动控制、通讯、航空与航天等学科领域中,常常会遇到“估计”问题。所谓估计,就是从带有随机干扰的观测数据中,提取有用信息。 估计问题可叙述为:如果假设被估计量是一个维向量,而维向量是其观测量,…
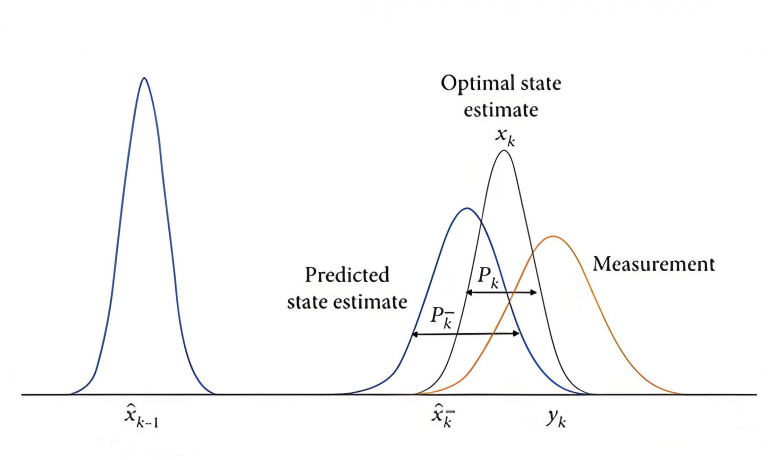
Posted in卡尔曼滤波教程 2.卡尔曼滤波简介 Posted by By ben kalman 2020-11-20 卡尔曼滤波是对随机信号作估计的算法之一。与最小二乘、维纳滤波等诸多估计算法相比,卡尔曼滤波具有显著的优点:采用状态空间法在时域内设计滤波器,用状态方程描述任何复杂多维信号的动力学特性,避开了在频域…
Posted in卡尔曼滤波教程 3.标准卡尔曼滤波 Posted by By ben kalman 2020-10-20 假设有线性离散系统如下: 和是零均值,不相关的白噪声,有已知的协方差矩阵和,既: 其中是函数,既如果那么,如果那么。我们的目的是在已知的系统动态方程和带噪声量测的基础上估计状态量。对于状态…
Posted in卡尔曼滤波教程 4.扩展卡尔曼滤波 Posted by By ben kalman 2020-09-20 阿波罗11的导航是一个非线性问题,标准卡尔曼滤波无法处理,需要非线性系统的解决方案,扩展卡尔曼滤波,它实现体现了工程与数学的完美结合——用有限的60年代计算资源,完成了人类史上最精确的太空导航,是…